大理矿用挖掘机多少钱一辆





1/6
- ¥240000.00
- 2025-01-01 19:48:59
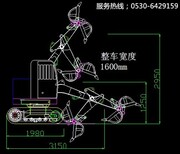
- 矿用挖掘机
- 李思建 18893781111
- 山东韦辰重工有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
由油泵工作,通过多路阀手柄来操纵大臂、斗杆、挖斗来完成上升、下降、前伸、后缩、回转、挖掘等各种功能。控制回转油缸伸缩可使大臂作左右旋转,回转油缸两端装有单向节流阀来控制回转的速度。控制大臂油缸伸缩可使大臂作上下运动,大臂油缸有杆腔一端装有单向节流阀来控制大臂下降的速度。控制小臂油缸伸缩可使小臂作前后运动。控制铲斗油缸伸缩可使铲斗作挖掘动作。铲斗上装有斗齿,磨损后可以更换
进行作业时,其中任一阀扳至某一工作位置时,则滑阀切断中立位通道、同时打开阀体两腔,液压油从高压腔进入油缸一腔,推动活塞完成某一作业动作,而油缸另一腔的低压油经阀的另一腔经滤清器、液压油散热返回油箱,若阀杆扳至相反位置,反向重复上述过程。
导致电动挖掘机出现履带越轨的原因有很多,分为外部原因和内部原因。常见的外部原因有:
1.驾驶员操作不当,前进和转弯操作都太过粗暴,可能会造成履带脱轨。
2.崎岖不平的路面会使履带板受力出现严重失衡,造成履带出现脱离。
- 矿用挖掘机
- 履带挖掘机
- 李思建
山东韦辰重工有限公司为你提供的“大理矿用挖掘机多少钱一辆”详细介绍